After years of careful testing, NASA has begun construction of its VIPER rover to hunt for ice and other resources at the Moon’s south pole.
The Volatiles Investigating Polar Exploration Rover (VIPER) is scheduled to launch to the Moon in November 2024, spending 100 days tracking down water.
VIPER will be the first planetary rover fitted with headlights, and will mark NASA's first ever venture to the lunar south pole.
Explained: How did the Moon form?
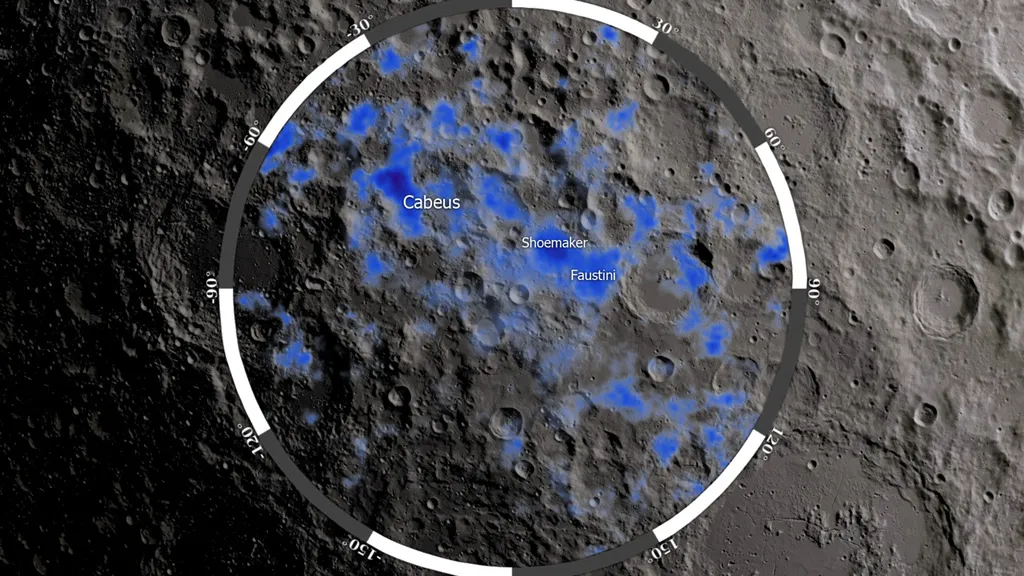
Perhaps it will find water ice, or perhaps frost mixed in with lunar soil, but the rover is able to drill up to 1 metre below the surface and search for water and other minerals.
Terry Fong is the chief roboticist at NASA Ames Research Center, who works on the VIPER rover.
We got the chance to catch up with Fong about how VIPER construction is going, and how you test a robot destined for the Moon.
How the LunaH-Map mission will map ice at the Moon's south pole

What is your role at Ames Research Center?
I work on the research and development of robotics technology for NASA
There’s a large R&D team here at NASA Ames, most of whom are working on the 2024 VIPER (Volatiles Investigating Polar Exploration Rover) lunar rover mission that’s going to be operating near the lunar south pole.
We’ve done a lot of research in the past with planetary rovers, taking these out into the field to develop new techniques and technologies for future planetary missions.
Why is it important to test rovers?
There’s a saying across NASA that is core to the engineering of space missions: "test as you fly”.
We want our systems to be tested in the most realistic, highest-fidelity-possible way so that we’re not surprised when we send a robot from sunny California to the cold Moon.
Obviously there are limitations, but we try to test the rover under the kind of conditions that we expect it to operate in.
What tests does VIPER need?
One thing we care a lot about for VIPER is that it’s going to be operating near the lunar south pole.
This is a place where the Sun is at a very low angle, 5–10 degrees above the horizon at most.
The shadows are very long – it’s like driving at sunset.
Part of what we’re testing is how our camera systems will work.
And in VIPER’s case, it’s the first rover to ever have lights, so how do they work under those conditions with lunar soil?
Does lunar soil affect VIPER’s view?
The lunar soil has this very interesting characteristic.
If you look directly down-Sun – that is, with the Sun behind you – the terrain doesn’t look uniform.
The lunar grains act like little reflectors, shaping the light so it ends up being brighter in the centre.
That has a real effect on the way we develop our camera and image-processing algorithms.
We have a regolith test bed which we use to mimic the conditions of what the soil will look like.
We use Sun simulators, which are a bright set of LED lights tuned to emulate the Sun’s brightness and beam pattern.

How do you test the rover's movement?
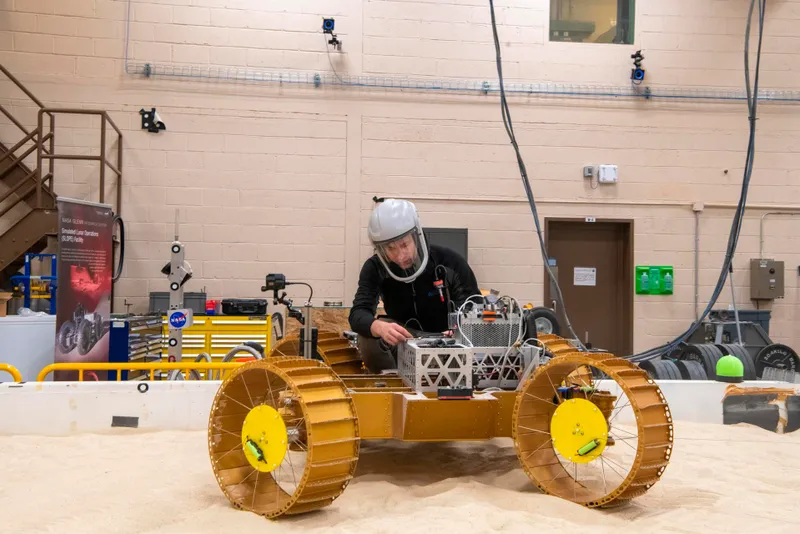
There are other labs, such as SLOPE (Simulated Lunar OPErations) at the Glenn Research Center, that are focused on the terramechnical properties, such as how mechanisms like wheels interact with the soil.
We’ve done a number of tests with VIPER driving in the SLOPE lab to understand how the wheels handle the soil on different slopes.
There are concerns that we don’t understand all the possibilities of what the terrain could be like.
Is it hard-packed or super-fluffy? Could we spin our wheels and dig in and not be able to get out?
We have developed various techniques that we can use to get the rover unstuck.
What are those techniques?
VIPER is different from past NASA rovers in that its suspension is connected to motors, so we can actually configure the robot differently and lift up each wheel independently.
We can basically walk the wheels. Also, we can change the wheel’s angle so we can swim, like breaststroke, through the soil.
Those are methods we’ve developed and tested to really address the risk that we could dig ourselves in and not be able to get out just by driving.

What’s VIPER’s current stage of development?
A couple of months ago, we started building the flight rover at NASA’s Johnson Space Center in Houston.
We’re now going from development and construction to training for operations, and we’re starting to look at how you remotely operate the rover.
The round-trip communication time is about 6–10 seconds by the time the data gets through the ground networks all the way to mission control. It’s not real-time.
We’ll send a set of commands, then wait for the rover to carry them out and report back what it did.
For VIPER, our target is to do that every four minutes. It’s very interactive.
We have a planetary scientist as one of the people actually operating the rover, which is something NASA hasn’t done before.
This interview appeared in the January 2024 issue of BBC Sky at Night Magazine
